My projects
Postdoctoral Research
- 浙江省青年科学基金(Zhejiang Provincial Natural Science Foundation for Young Scientists)
- 中国博士后科学基金第75批面上资助(China Postdoctoral Science Foundation)
Doctoral Research
7-DOF Modular Anthropomorphic Manipulator
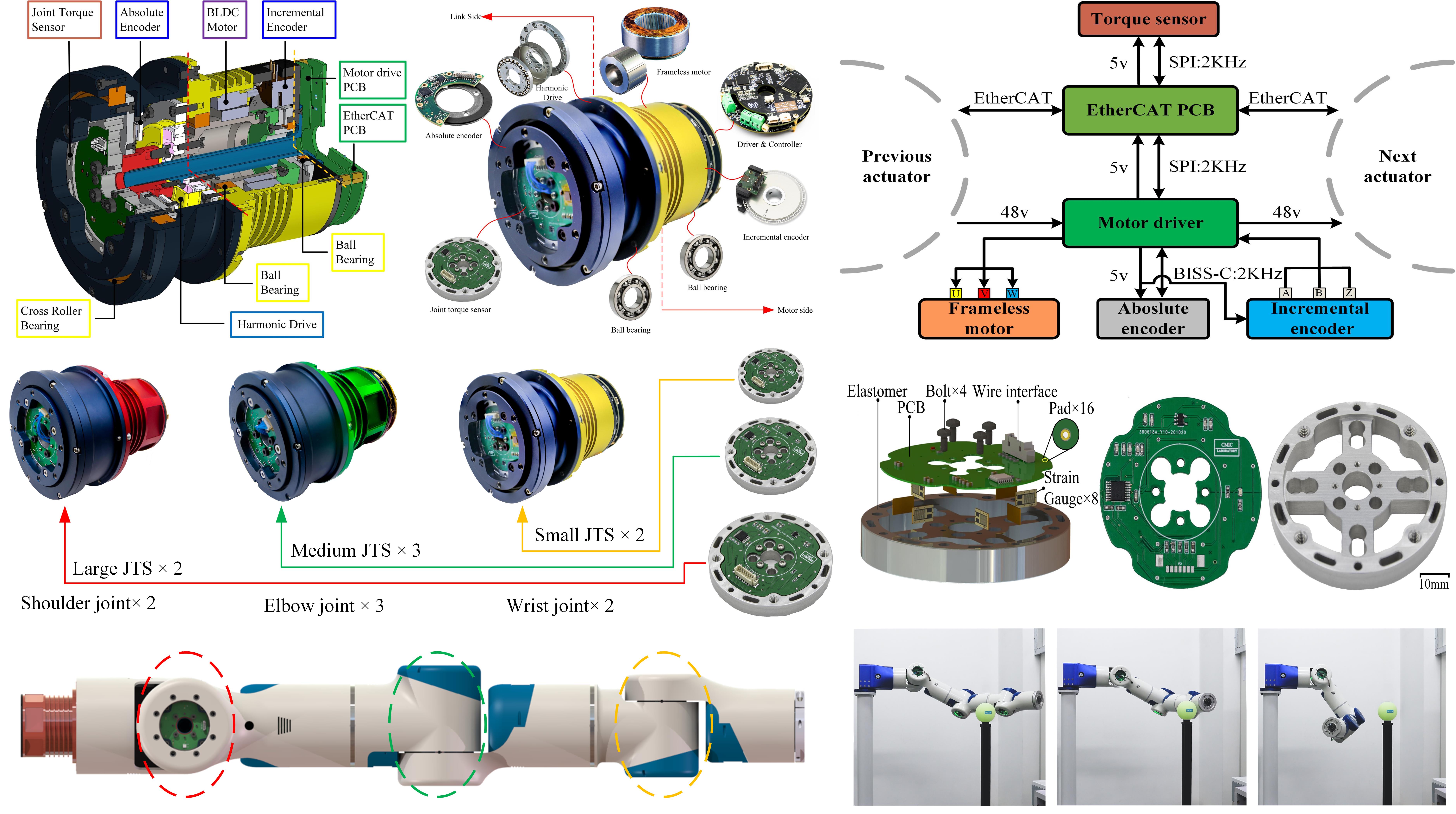
1. Structure & Hardware Design
- Design of three size robotic modular joint with embeded joint torque sensor;
- Design of 7-DOF anthropomorphic manipulator;
- Design of electromechanical coupling quick changer.
| type | Small | Medium | Large |
|---|---|---|---|
| Size | φ96 mm×110 mm | φ107 mm×140 mm | φ107 mm×140 mm |
| Mass | 1.12 kg | 1.75 kg | 2.35 kg |
| Rated torque | 27 Nm | 75 Nm | 150 Nm |
| Rated speed | 4.7 rad/s | 2.21 rad/s | 1.83 rad/s |
| Communication | EtherCAT | EtherCAT | EtherCAT |
| Break | None | None | None |
| Properties | Small | Medium | Large |
|---|---|---|---|
| Size | φ60 mm×H9 mm | φ70 mm×H10 mm | φ80 mm×H11 mm |
| Mass | 36.0 g | 56.7 g | 80.2 g |
| Rated torque | 35 Nm | 90 Nm | 200 Nm |
| Resolution | 0.02 Nm | 0.1 Nm | 0.3 Nm |
| Frequency | 2K Hz | 2K Hz | 2K Hz |
| Properties | Ours |
|---|---|
| Rated torque | 5 kg |
| Mass | 15.7 kg |
| DOF | 7 |
| Reach | 850 mm |
| communication | EtherCAT |
2. Kinematics & Dynamics Modeling and Simulation
- Arm configuration, forward kinematics, workspace(Reachable & Dexterous) and manipulability analysis;
- Analytical inverse kinematics solution with arm manifold, free-singularity and joint limits avoidance for 7-DOF manipulator;
- Dynamics modeing and simulation of 7-DOF manipulator.

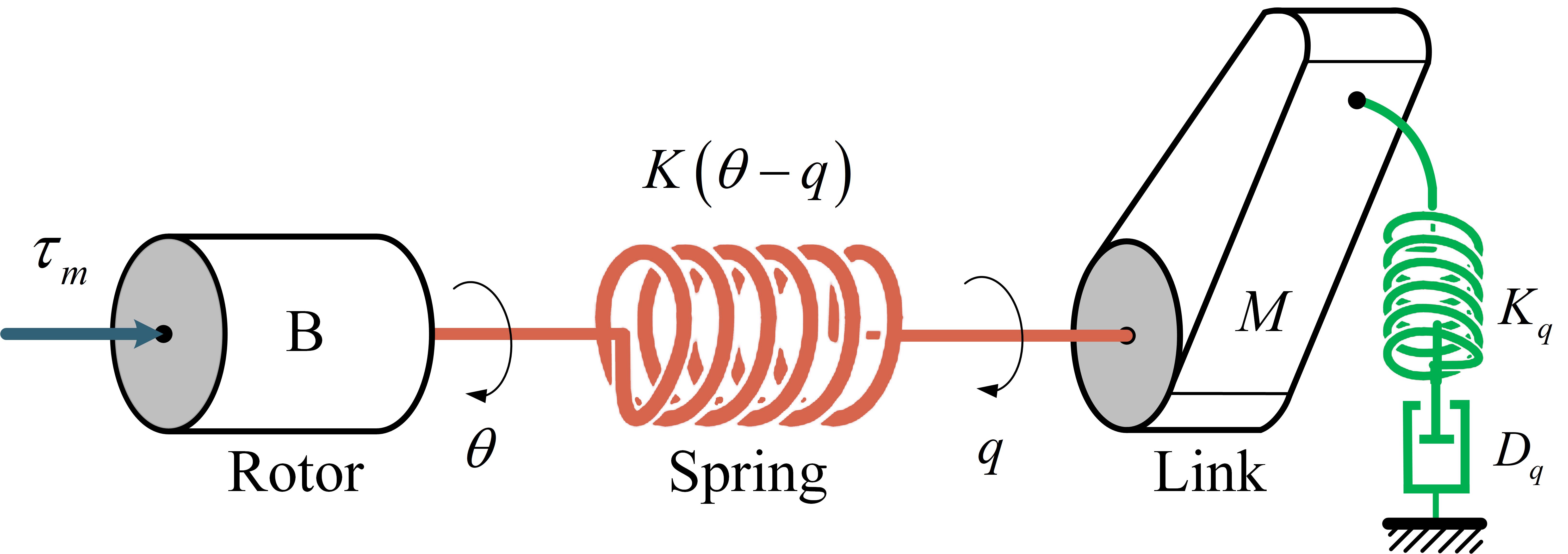
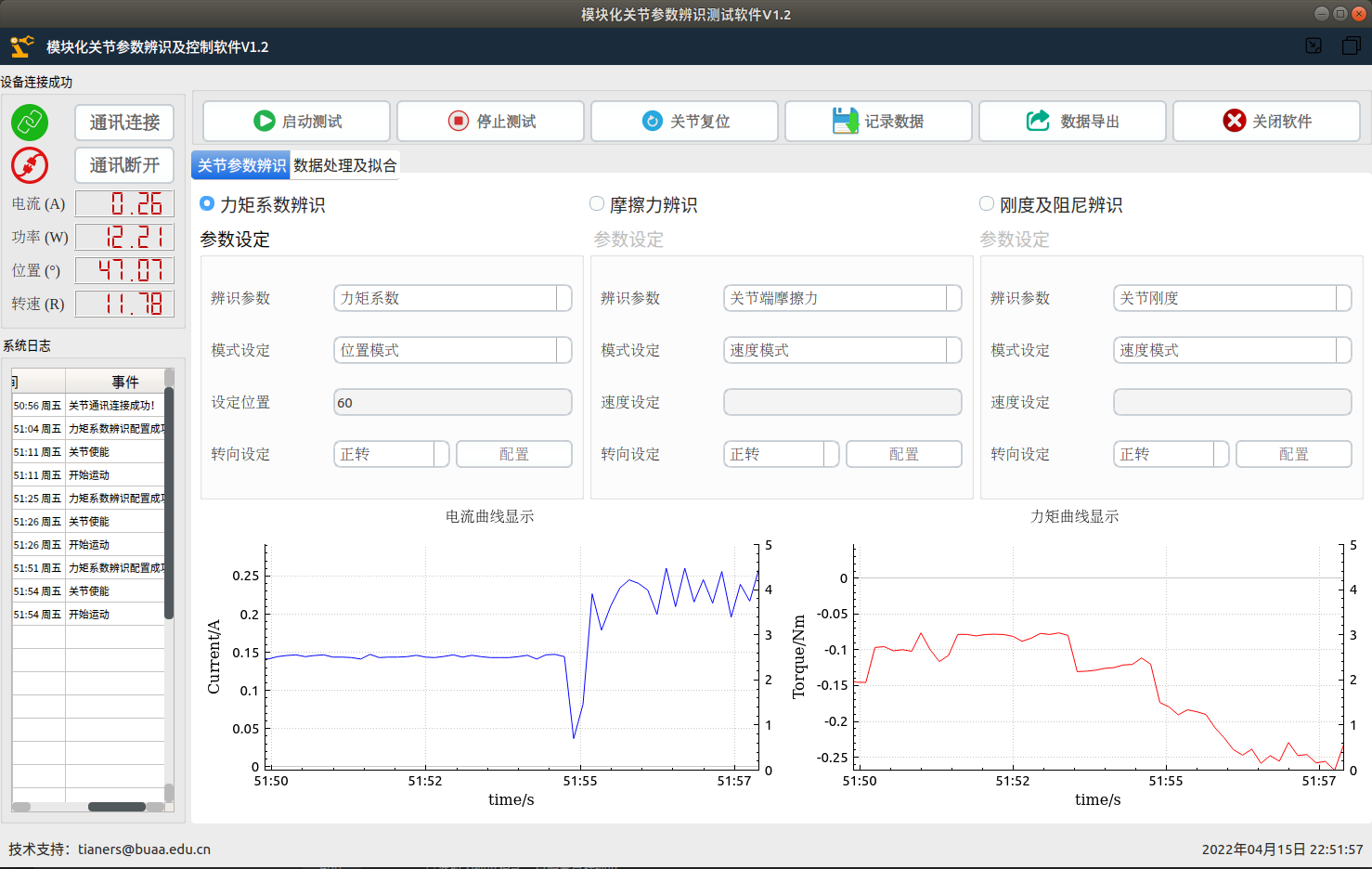
3. Flexible Joint Modeling, Parameter Identification, and Compliance Control
- Flexible joint modeing;
- Motor-torque coefficient identification, friction identification, stiffness and damping identification;
- Full-state feedback control.
4. 7-DOF Manipulator Compliance Control
- Joint space impedance control;
- Cartesian space impedance control;
- Nullspace impedance control.
5. Related Media
Dexterous Hand Design and Compliance Control
Main work:
- Proposed a simplified configuration to imitate the daily human hand grasps;
- Dexterous hand design, including modular finger design, thumb design, palm design, and layout optimization;
- Developed a hand prototype, and the dexterity of the prototype was verified by Cutkosky classification test.
| Properties | Ours |
|---|---|
| Size | H215 mm×L148 mm×W75 mm |
| Mass | 0.56 kg |
| DOF | 6 |
| Load | 1.3 kg (envelop grasping) |
| communication | EtherCAT |

Related Media
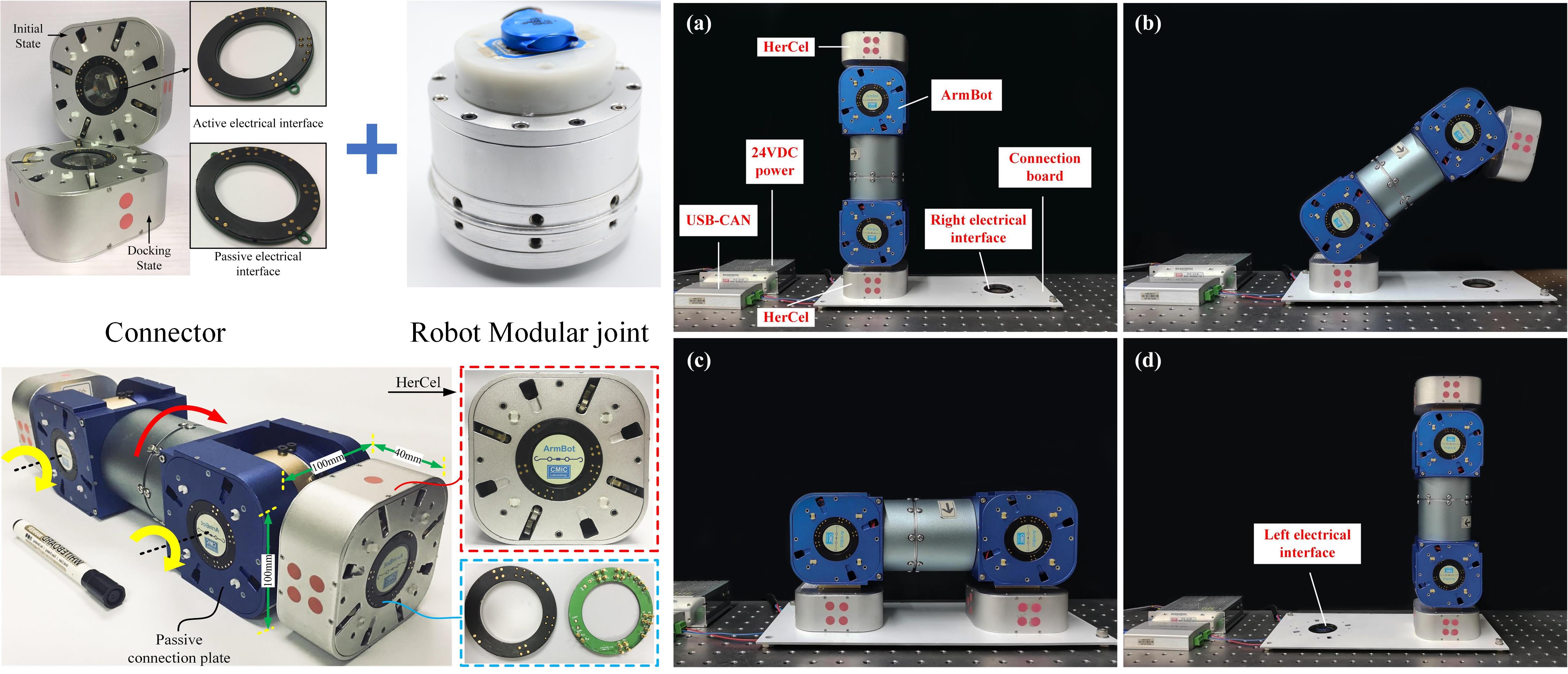
Self-Reconfigurable Modular Robot
Main work:
- Responsible for the 3-DOF self-reconfigurable robot design, including modular joint design (structure), connector design (structure & hardware circuit);
- Proposed an electromechanical interface for power & communication transmission and orientation detection;
- Developed a human-interaction software 3-DOF self-reconfigurable robot based on Qt Creator, and a series of experiments of the prototype were carried out.
| Properties | Value | Properties | Value |
|---|---|---|---|
| Mass | 0.75 kg | Size | φ75 mm×L76 mm |
| Rated torque | 15 Nm | Rated speed | 15 RPM |
| Break | None | Repeated positioning accuracy | ±0.5° |
| Encoder | Multi-absolute | Sensor | Current, voltage, temperature |
| Power | 24VDc | Communication | CAN Bus |